{kind=link}
Collabortive Data
One of the personal data that we thought was interesting to visualize was productivity. By comparing and competing with other teammates, this might motivates individuals to be more productive. We chose contribution to Github repository as our personal data. We will be showing the contribution to the repository by each user.
What is Git-tama?
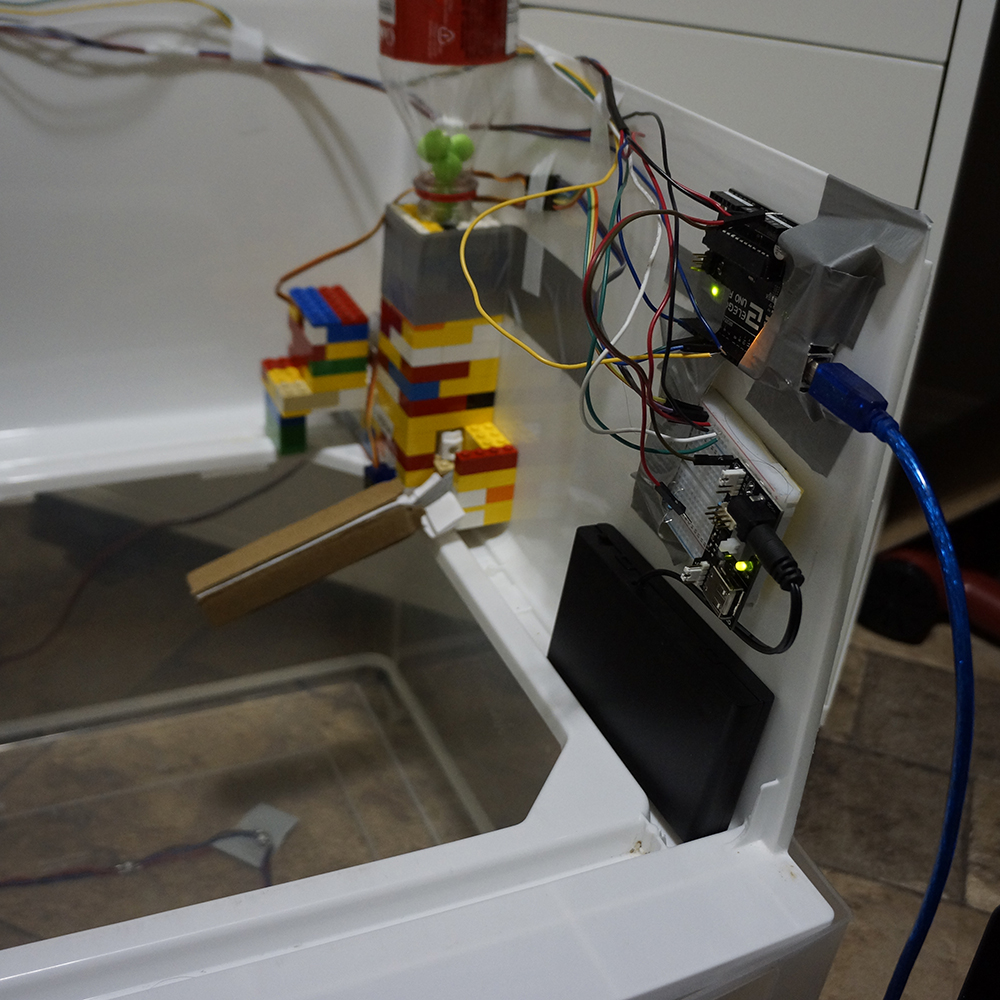
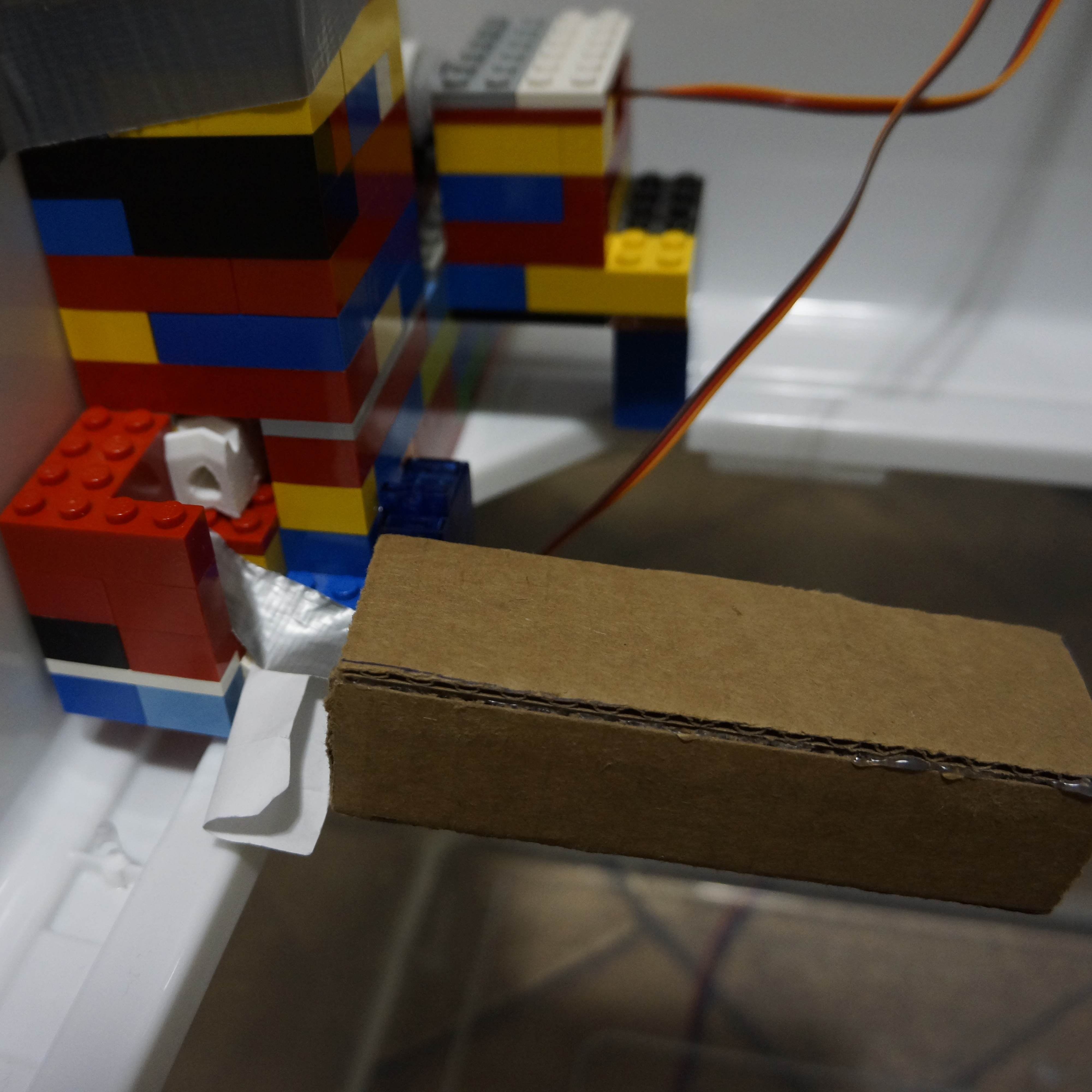
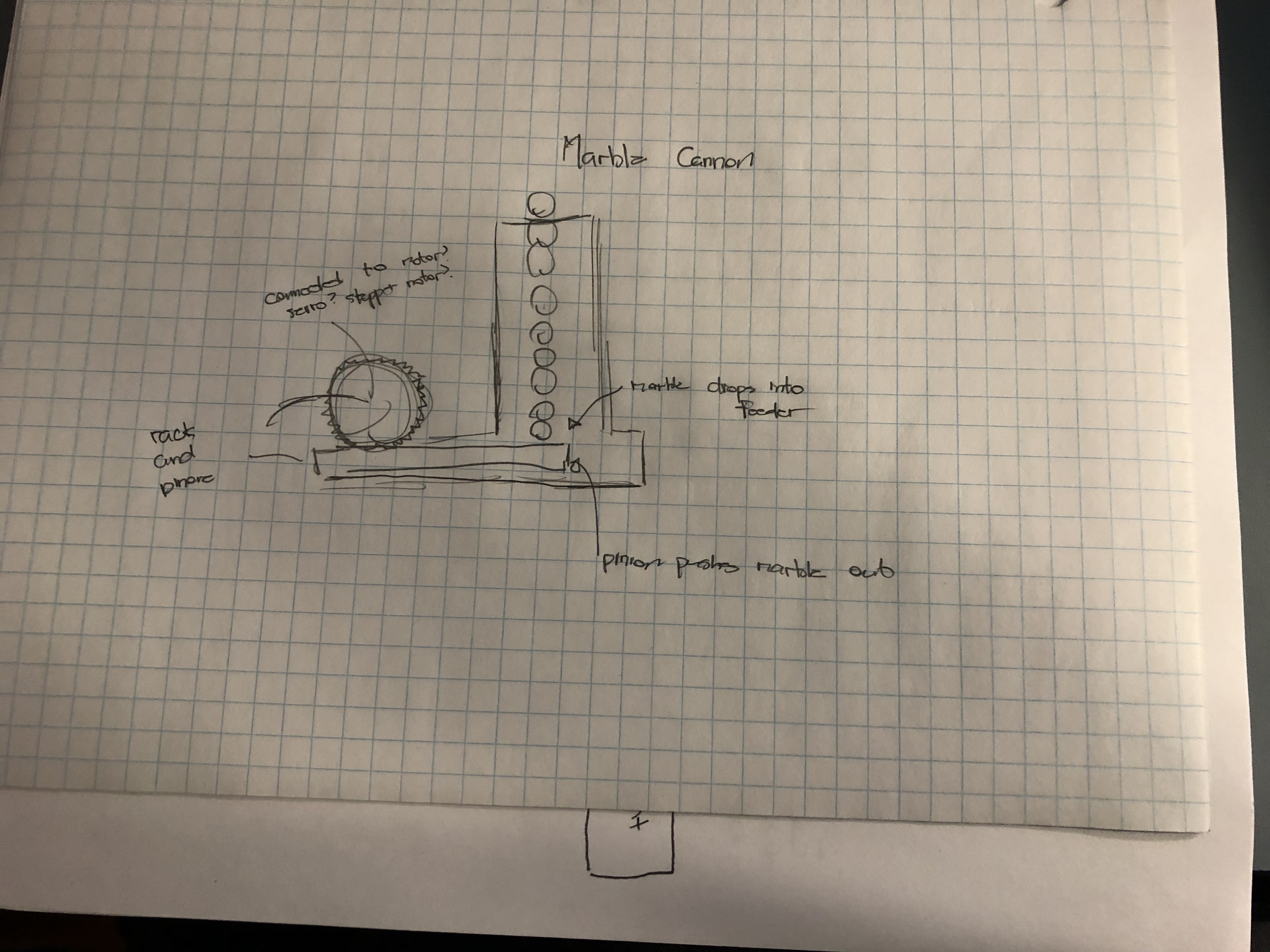
Our project has a listener where it listens to a Github repository, and when there is a commit from a user, it detects who and how many addition and deletion has been done by that user. Depending on the commit size, the listener determines the slope of the ramp. Then the listener sends a string to Arduino with information of which user committed and the slope of the ramp. When string is received in Arduino, it parses the string and activates the servo according to which the user has committed. The slope of the ramp is adjusted by a servo near where the marble exits from the machine. There is rack and pinion attached to a servo which controls the flow of the marble. While the marble is being fired, there are illumination from LED strips depending on which user has committed.
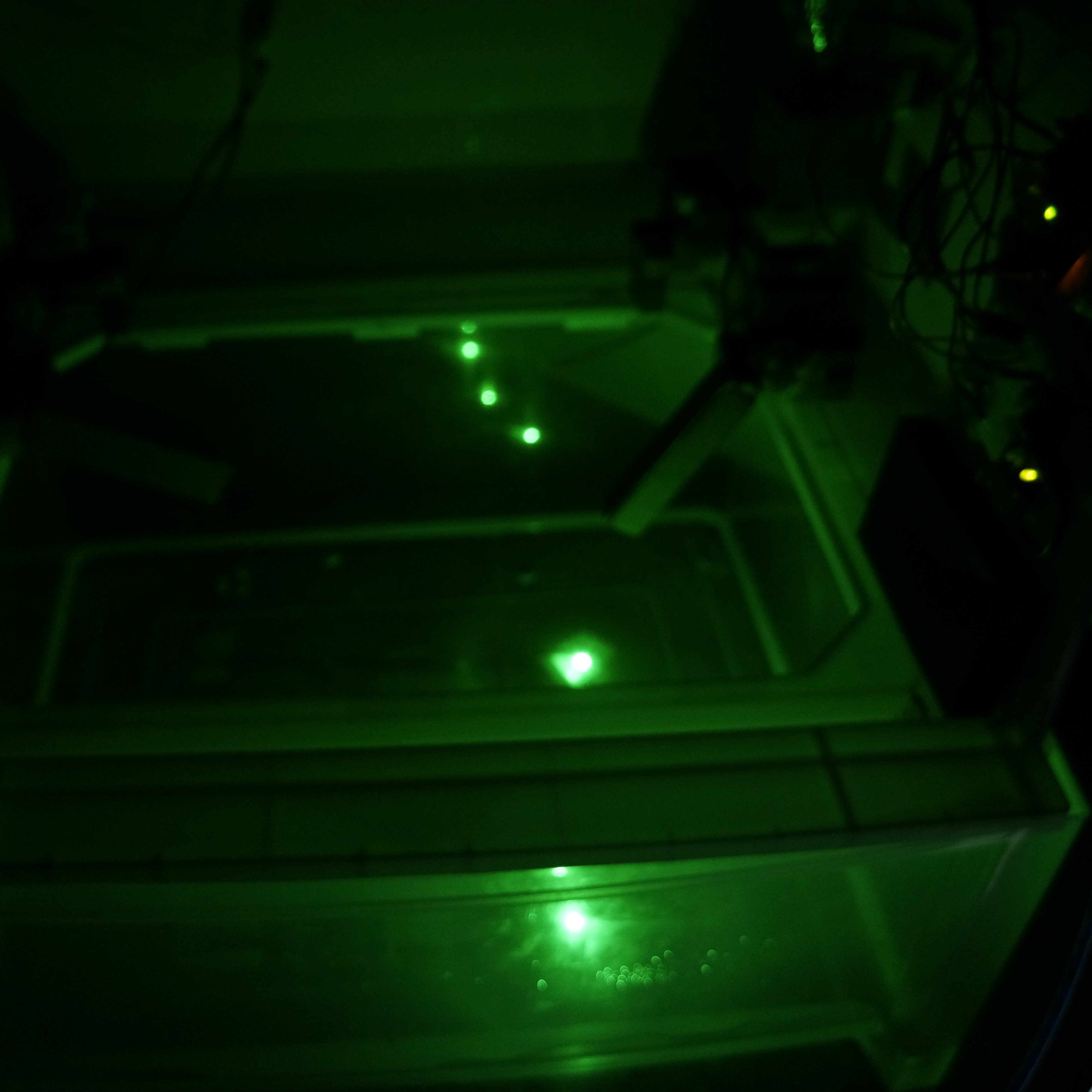
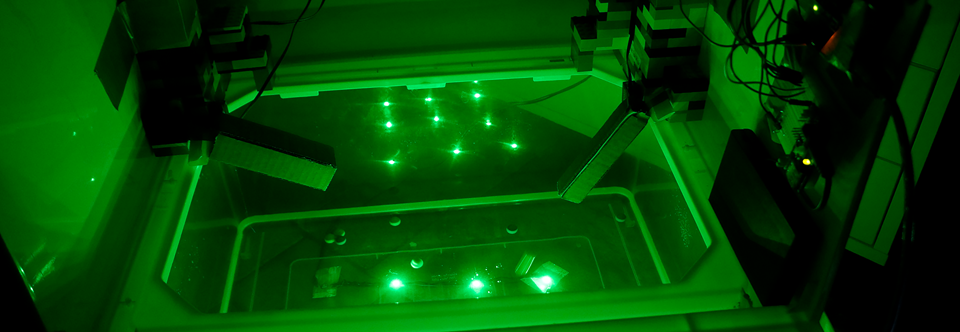
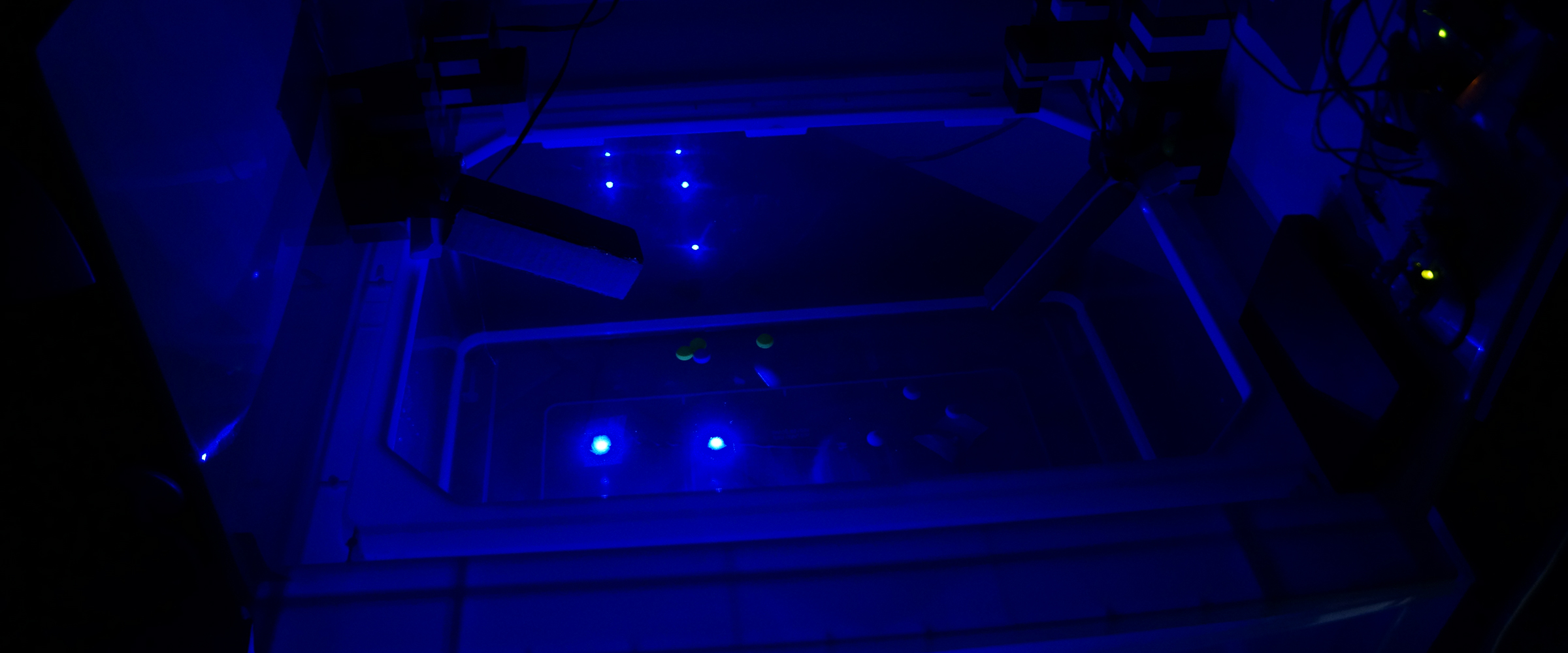
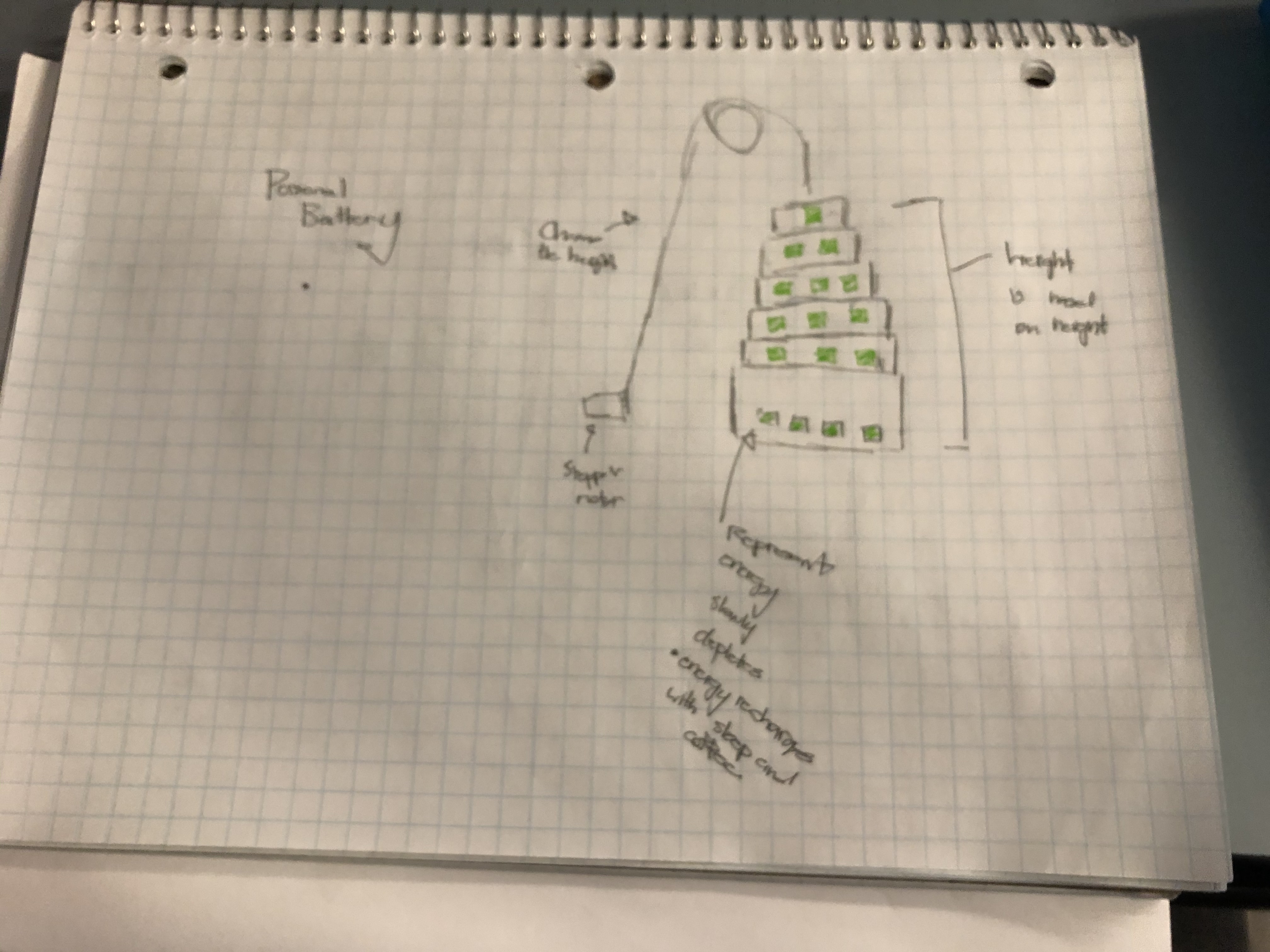
The marbles
Each of the marble shooters represents a different user and the marbles it shoots represents the commits that user has made. This physicalization presents the data in several ways. First to an active viewer, it communicates each commit through the firing of the marbles. For a passive viewer, the physicalization produces an audible water dropping sound as well as ambient light. Finally for viewers in the future, the marbles leave tangible history of the commits in the physicalization
Video Demo
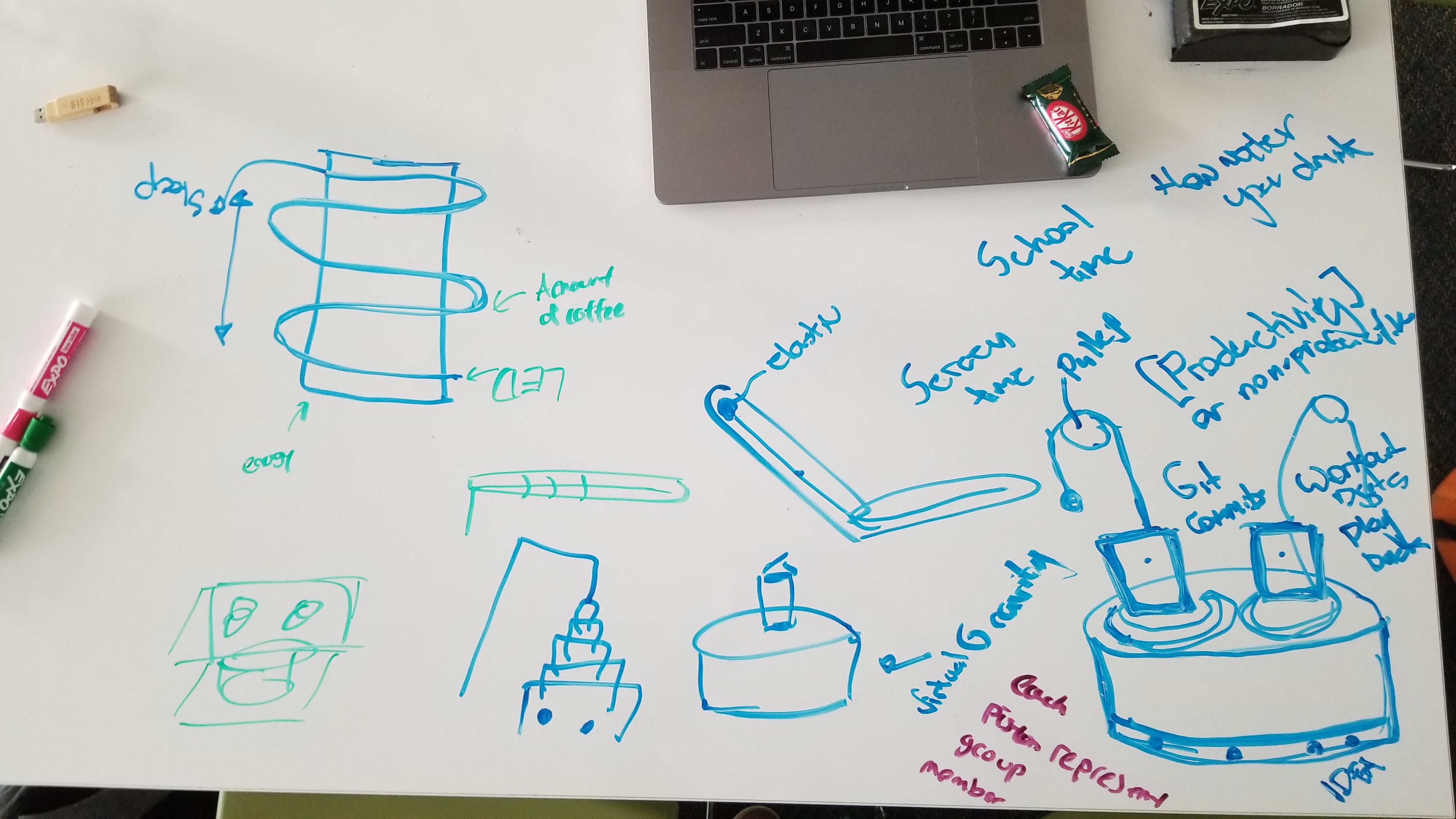
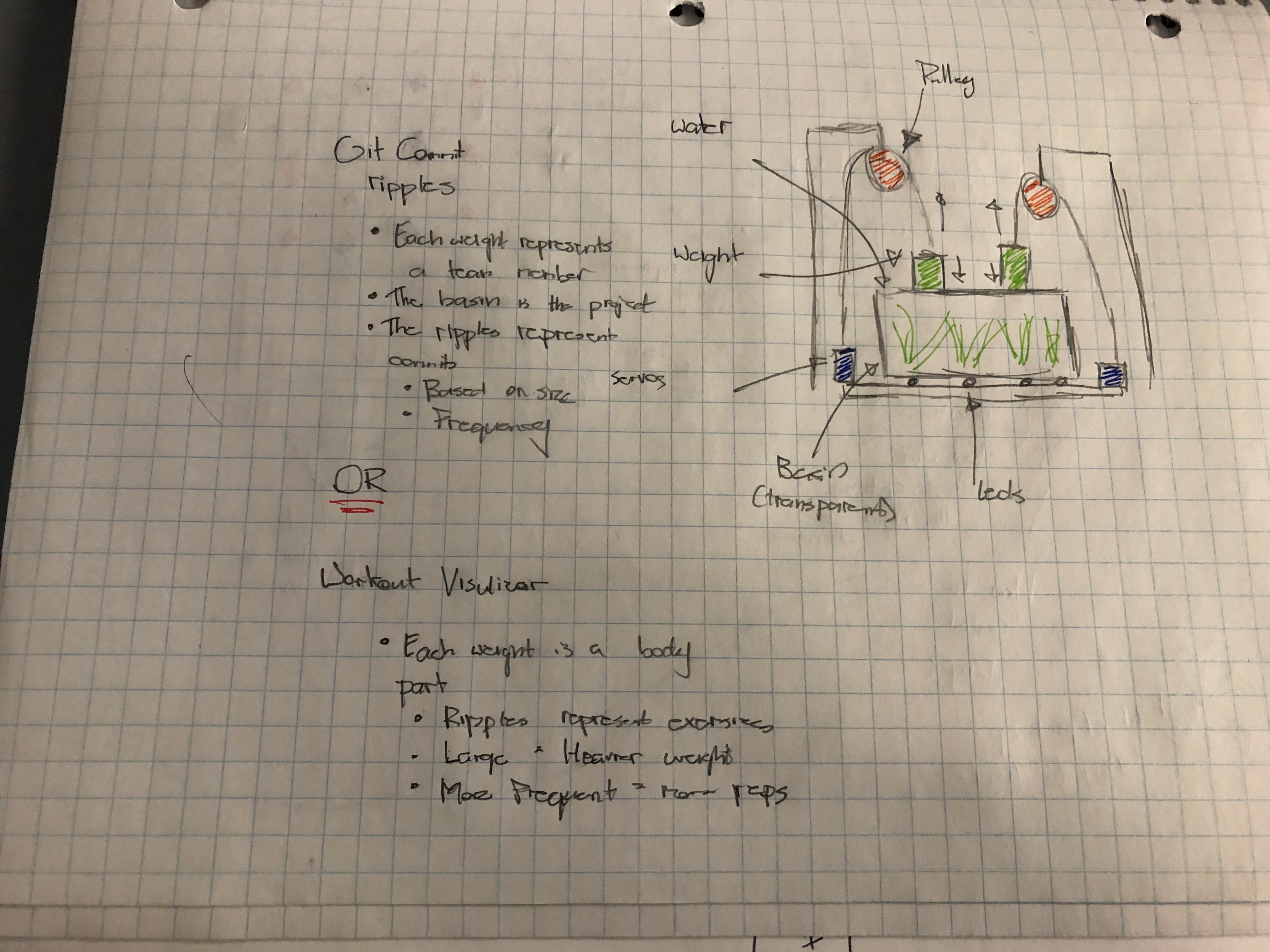
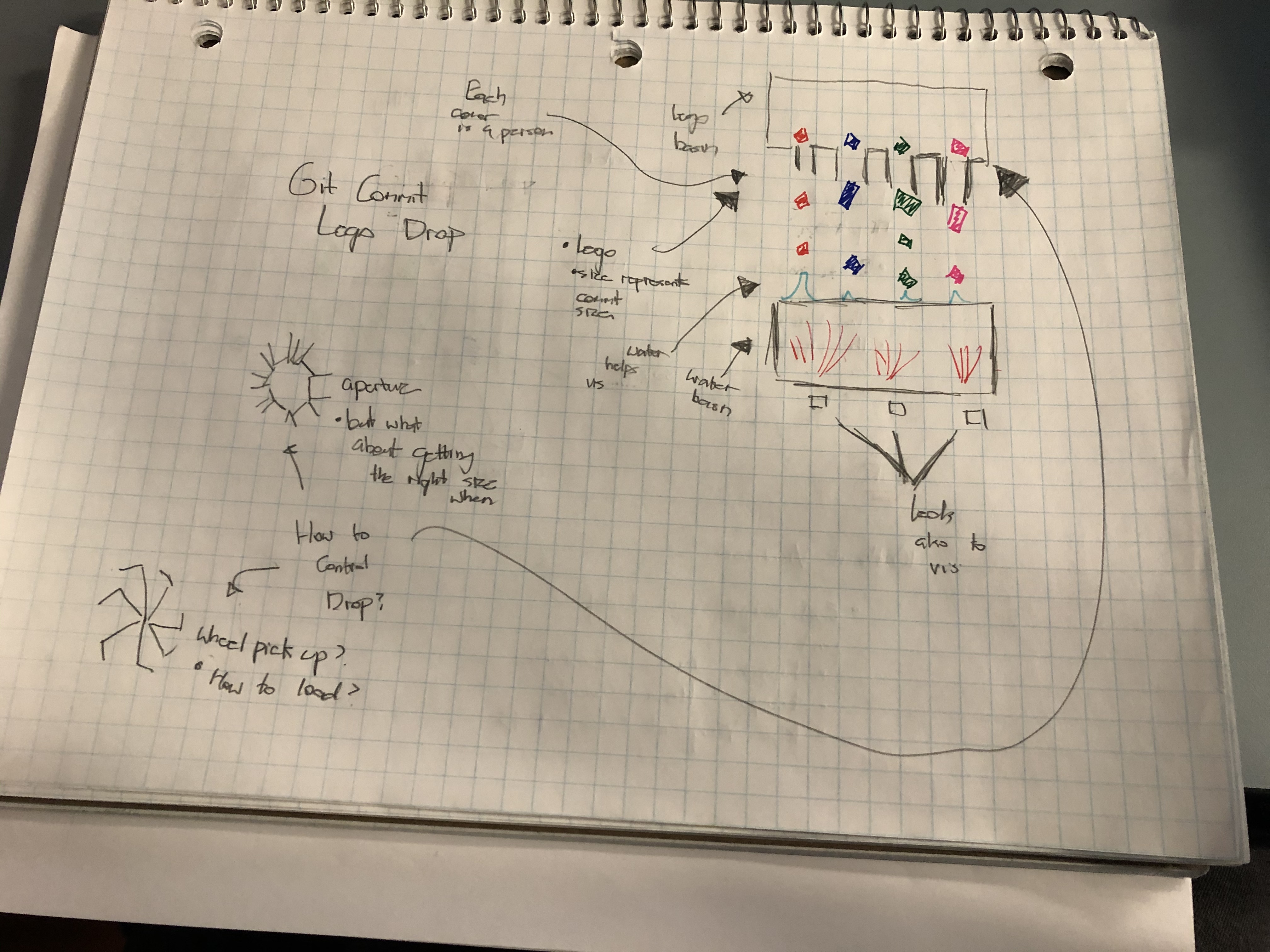
Sketches
Sources used:
https://forum.arduino.cc/index.php?topic=225329.msg1810764#msg1810764
https://forum.arduino.cc/index.php?topic=396450.0
https://forum.arduino.cc/index.php?topic=534852.0
for communicating with the arduino through serial
https://forum.arduino.cc/index.php?topic=396450.0
https://forum.arduino.cc/index.php?topic=534852.0
for communicating with the arduino through serial
https://www.thingiverse.com/thing:21206
for the rack and pinion 3d models
for the rack and pinion 3d models
https://www.arduino.cc/en/tutorial/sweep
for working with the servos
for working with the servos
https://developer.github.com/v3/
for working with Github API
for working with Github API